

Within the Project COPE a central database named Collective Perception Map, which provides interfaces following the Open Platform Communications – Unified Architecture (OPC-UA) is developed. These allow for the secure and correct transmission of the variables denoting the intersection’s current traffic situation. These data is available in real time in a machine readable format.
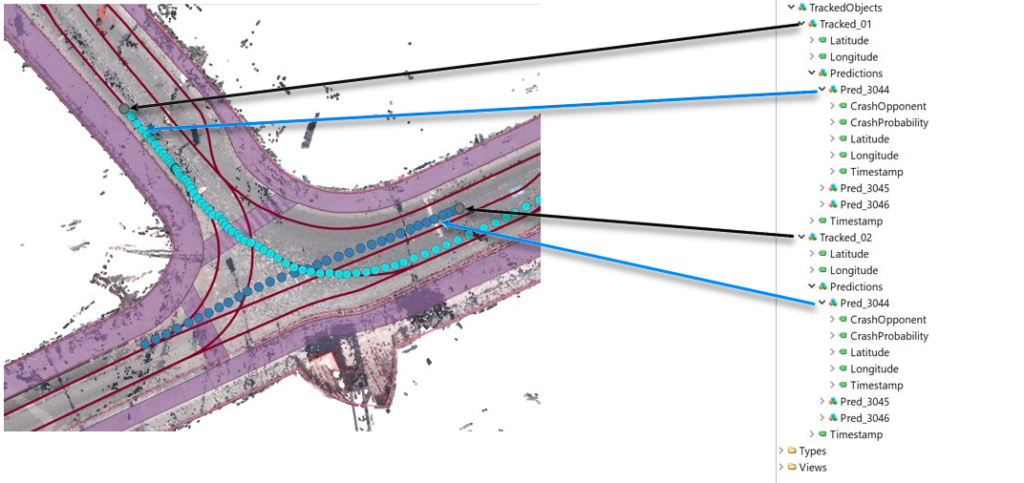
The COPE map, after having been initialised with a static UHD map, is refreshed constantly with position traces of vehicles and VRUs, determined by local traffic infrastructure. These data is considered by a trajectory prediction module, which feeds collision predictions back. Consequently, a machine-readable image of the current and the next status is obtainable through the OPC server.