Zielsetzung des Projektes COPE (Collective Perception) war die maßgebliche Reduktion von Unfällen mit ungeschützten Verkehrsteilnehmer*innen durch eine deutlich verbesserte Effektivität der Fahrerassistenz-Systeme von (teil-) automatisierten Fahrzeuge zu erreichen, indem die Fahrzeuge miteinander und mit der Infrastruktur vernetzt werden, um diesen so einen besseren Austausch der eigenen Intention zum kooperativen Abgleich ihrer Fahr-Manöver zur ermöglichen und die sensorische Erfassung mit den Sensor- und Objekt-Informationen aus anderen Fahrzeugen und der Infrastruktur mit anderen Sichtwinkeln auf die kritischen Verkehrsteilnehmer*innen zu erweitern.
Dabei wurde untersucht, wie die passenden Informationen ausgetauscht werden, um sicher die richtigen Entscheidungen für die effektivsten Aktionen zur Vermeidung von Kollisionen und gefährlichen Situationen treffen zu können. Ein wesentliches Element dabei war die Intentionen der Verkehrsteilnehmer*innen in einer passenden Form zu formulieren, sodass diese von den anderen Verkehrsteilnehmer*innen klar interpretiert und in der Manöverplanung berücksichtigt werden können.
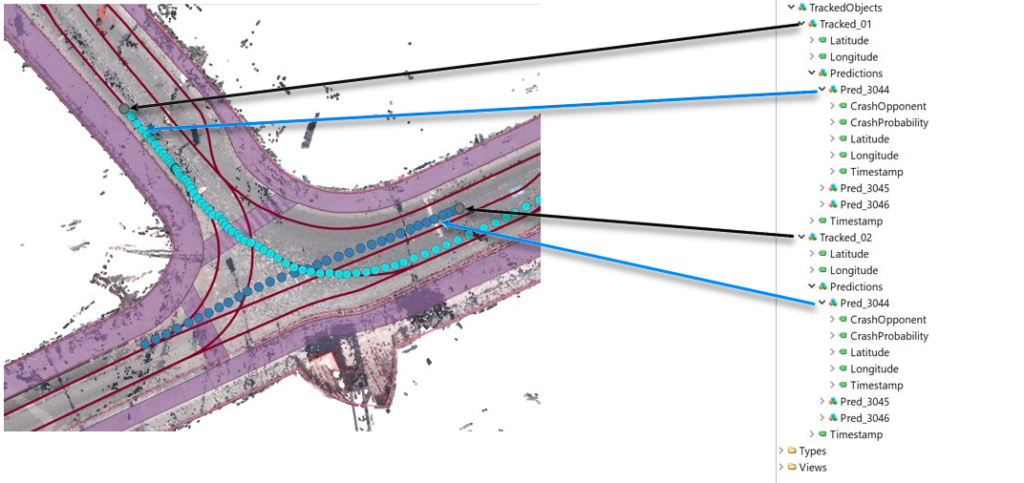
Im Zuge des Projektes wurde eine für alle Partner verfügbare Datenfusionsplattform in Form eines OPC-Servers entwickelt, welche ermöglichte, per Infrastruktursensorik und Connected Cars sensierte Daten zu verarbeiten. Dabei wurde gleichermaßen der historische, aktuelle und prädizierte Zustand für die Module der unterschiedlichen Partner verfügbar gemacht. Die Erfahrungen im Projekt zeigten, dass besonderes Augenmerk auf eine gleichmäßige und kontinuierliche Datenübertragung der sensierten Szene zur gemeinsamen Datenplattform gelegt werden muss. Dabei ist bei der Erfassung von Echtzeitdaten eine stabile Quelle, etwa für Positions- und Orientierungsdaten, notwendig. Je nach Qualität der Sensorik bzw. der verarbeitenden Software entstehen bei der Positions- und Orientierungsbestimmung Fehler, welche durch die Einbindung von Plausibilitätsüberprüfungen in Echtzeit durch damit kombiniertes UHD-Kartenmaterial, beispielsweise partikelfilterbasiertes Map-Matching, kompensiert werden könnte.
Die oben erwähnte gemeinsame Datenplattform inklusive deren Inputmodulen wurde in der Entwicklungsphase des Demonstrators dezentral an den physischen Standorten der Partner betrieben. Dabei erfolgte beispielsweise die Sensierung von Positionsdaten an der Kreuzung Hallein/Pernerinsel in Form von Edge Computing an einem Embedded-System. Die Generierung von Testdaten der Connected Cars wurde teilweise in Wien durchgeführt. Die gemeinsame Datenplattform in Form eines OPC-Servers wurde in Graz betrieben. Dieser Modus erlaubte eine flexible und effiziente Weiterentwicklung der Einzelkomponenten ohne ständig notwendige Integrationstests vor-Ort. Naturgemäß konnten so nur bedingt Tests der Latenz des Gesamtsystems durchgeführt werden. Ein möglicher Lösungsansatz wäre es, das Gesamtsystem zu containerisieren und als Einheit an einem gemeinsamen Standort zu betreiben. Hierfür würden sich Softwareentwicklungsmethoden aus dem Gebiet der Continuous Integration anbieten.
Die Umsetzung der technischen Entwicklungen wurde in Hallein und Linz erfolgreich umgesetzt. COPE wurde bei einer österreichweit sichtbaren ATTC-Veranstaltung (C-ITS Verkehrslösungen in der Autobahnmeisterei, https://www.attc.at/c-its-demo-18-10-2022/) in Wien demonstriert (und weiters Vertreter*innen der Stadt Linz vorgestellt. Die Projektergebnisse werden durch die Projektpartner weiter gemeinsam bearbeitet (derzeit läuft eine Antragserstellung). Folgende Themen werden in diesem Projekt vor allem angesprochen: Wie kann eine Kreuzung der Zukunft mit einem offenen und sicheren Informationsaustausch aussehen? Dabei wird untersucht wie mittels tatsächlicher Ausführung und Bewertung einer konkreteren Funktionsumsetzung mit unterschiedlichen OEMs aus dem Automobil- und Zweirad-Bereich an einer realen Kreuzung eine tatsächliche Effektivitätsbewertung gezeigt werden kann. Diese Umsetzung beinhaltet sowohl eine verfeinerte technische Umsetzung (zB UHD Karte mit gleichzeitig geringer Latenz von Echtzeitdaten und VRUs) als auch allgemein gültige verbesserte Verhaltensmodelle von allen Verkehrsteilnehmer*innen.
Das Projekt COPE wurde im Rahmen der Ausschreibung „Mobilität der Zukunft – 14. Ausschreibung“ (FFG-Nummer 879622) umgesetzt. Projektpartner waren: ANDATA, JOANNEUM RESEARCH, HITEC, SWARCO FUTURIT, FH OÖ – LOGISTIKUM (Projektleitung).