On October 18, the ATTC members met with invited guests from research, development, implementation and operation to show and discuss the latest achievements and developments in the field of C-ITS, Car2X, V2X, Future’s Mobility, #CCAM (Cooperative, Connected, Automated Mobility), Intelligent Road.
FH-OÖ/Logistikum, Joanneum Research, HiTec and Swarco, ANDATA presented results from the project COPE – Collective Perception on collision avoidance with vulnerable road users. Two of our vehicles drove in real life in the city of Hallein and were displayed live in Vienna in the Kaisermühlen motorway maintenance department via a digital twin of the model region and an ongoing estimation of the collision risks was carried out in order to intervene in the traffic situation at an early stage, prevent accidents and reduce dangers.
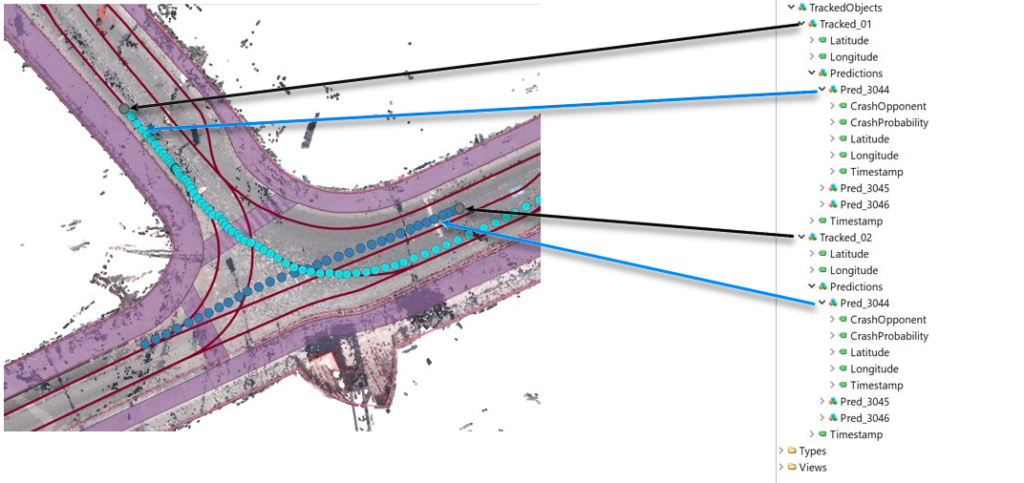
The digital twin of the transport system of the city of Hallein was implemented in accordance with the DIGEST project, which has also just been successfully completed. In doing so, the requirements of formal information modeling were strictly followed in order to prepare a basis for later services such as ISAD/ODD (Infrastructure Support for Automated Driving with distributed ODD awareness) and subsequently expand it into a CCAM Decision Support Platform.