The objective of the COPE (Collective Perception) project was to achieve a significant reduction in accidents involving vulnerable road users by significantly improving the effectiveness of the driver assistance systems of (partially) automated vehicles by networking the vehicles with each other and with the infrastructure in order to enable them to better exchange their own intentions for the cooperative adjustment of their driving manoeuvres and to expand the sensory acquisition with the sensor and object information from other vehicles and the infrastructure with other viewing angles on the critical road users.
The project investigated how the appropriate information is exchanged in order to safely make the right decisions for the most effective actions to avoid collisions and dangerous situations. An essential element was to formulate the intentions of the road users in a suitable form so that they can be clearly interpreted by the other road users and taken into account in the manoeuvre planning.
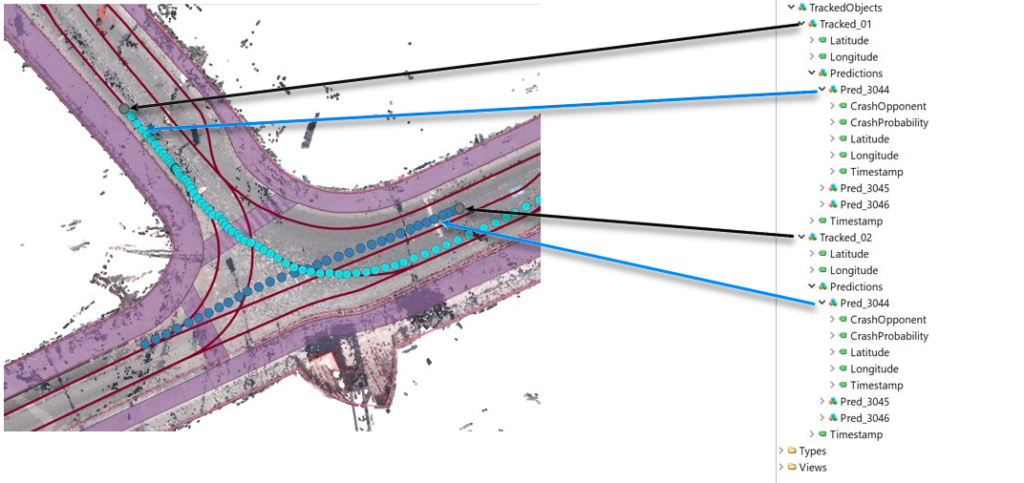
In the course of the project, a data fusion platform available to all partners was developed in the form of an OPC server, which made it possible to process sensitive data via infrastructure sensors and connected cars. In the process, the historical, current and predicted status was made available to the modules of the different partners. The experiences in the project showed that special attention must be paid to a uniform and continuous data transmission of the sensed scene to the common data platform. In this context, a stable source, for example for position and orientation data, is necessary for the acquisition of real-time data. Depending on the quality of the sensor technology or the processing software, failures occur in the determination of position and orientation, which could be compensated by integrating plausibility checks in real time using combined UHD map material, for example particle filter-based map matching.
The above-mentioned common data platform including its input modules was operated decentrally at the physical locations of the partners during the development phase of the demonstrator. For example, the sensing of position data at the Hallein/Pernerinsel junction took place in the form of edge computing on an embedded system. The generation of test data for the Connected Cars was partly carried out in Vienna. The common data platform in the form of an OPC server was operated in Graz. This mode allowed flexible and efficient further development of the individual components without the need for constant on-site integration tests. Naturally, tests of the latency of the entire system could only be carried out to a limited extent. A possible solution would be to containerise the entire system and operate it as a unit at a common location. Software development methods from the field of Continuous Integration would be suitable for this.
The technical developments were successfully implemented in Hallein and Linz. COPE was demonstrated (and also presented to representatives of the city of Linz) at an ATTC event (C-ITS Verkehrslösungen in der Autobahnmeisterei, https://www.attc.at/c-its-demo-18-10-2022/) in Vienna that was visible throughout Austria. The project partners will continue to work together on the project results (an application is currently being prepared). The following topics will be addressed in this project: How can a crossroads of the future with an open and secure exchange of information look like? It will be investigated how an actual effectiveness evaluation can be demonstrated by means of actual execution and evaluation of a concrete function implementation with different vehicle and motorcycle OEMs at a real intersection. This implementation includes both a refined technical implementation (e.g. UHD map with simultaneous low latency of real-time data and VRUs) and generally valid improved behavioural models of all road users.
The COPE project was implemented within the framework of the call for proposals “Mobility of the Future – 14th Call for Proposals” (FFG number 879622). Project partners were: ANDATA, JOANNEUM RESEARCH, HITEC, SWARCO FUTURIT, FH OÖ – LOGISTIKUM (project management).