

Innerhalb des Projekts COPE wird eine zentrale Datenbank als Collective Perception Map umgesetzt, die folgend der Open Platform Communications – Unified Architecture (OPC-UA), Schnittstellen anbietet. Diese ermöglichen die sichere und korrekte Übertragung von Zustandsgrößen der Verkehrssituation in Echtzeit in einem maschinenlesbaren Format.
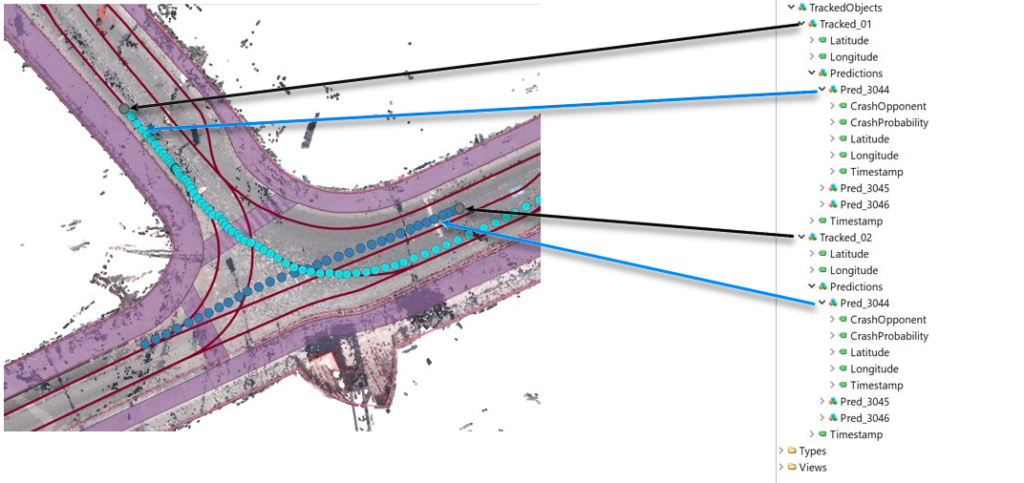
Die COPE Map wird dabei – nach einer Initialisierung mit statischer UHD Karteninformation – durch Positionsdaten von Fahrzeugen und VRUs ermittelt durch Infrastruktursensorik sowie deren Trajektorienprädiktion inklusive einer Kollisionswahrscheinlichkeit aktualisiert. Somit wird die Abbildung der Beobachtung des aktuellen sowie Vorhersage des nächsten Zustandes innerhalb des OPC Servers möglich.
