Am 18. Oktober trafen sich die ATTC-Mitglieder mit geladenen Gästen aus Forschung, Entwicklung, Implementierung und Betrieb, um die neuesten Errungenschaften und Entwicklungen im Bereich C-ITS, Car2X, V2X, Mobilitaet der Zukunft, CCAM (Cooperative, Connected, Automated Mobility), Intelligente Straße zu zeigen und diskutieren.
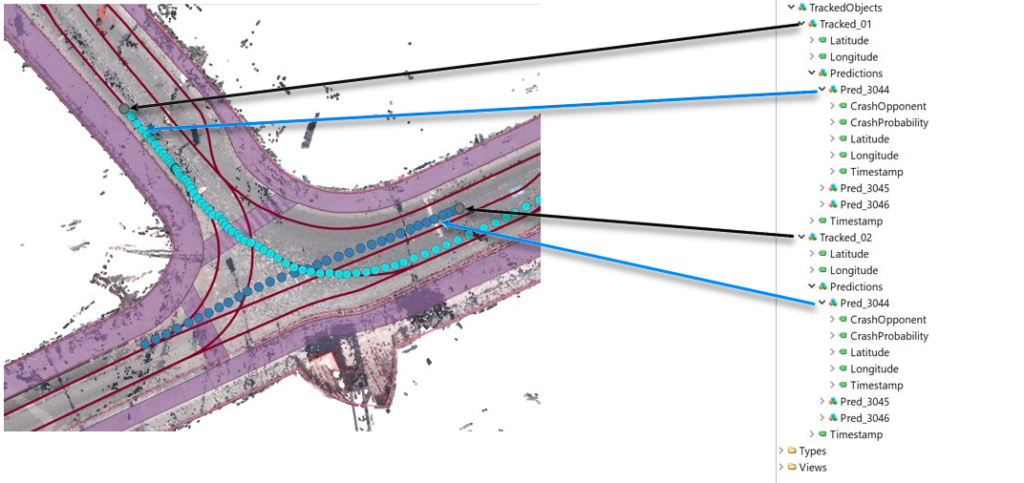
Die Projektpartnern präsentierte Ergebnisse aus dem Projekt COPE – Collective Perception zu Kollisionsvermeidung mit ungeschützten Verkehrsteilnehmern. Dabei fuhren zwei Fahrzeuge aus dem Projekt real in der Stadt Hallein und wurden über einen Digitalen Zwilling der Modellregion live in Wien in der Autobahnmeisterei Kaisermühlen der ASFINAG dargestellt und dabei eine laufende Schätzung der Kollisionsgefahren durchgeführt, um ggf. frühzeitig ins Verkehrsgeschehen einzugreifen, Unfälle zu verhindern und Gefahren zu verringern.
Der dabei eingesetzte Digitale Zwilling des Verkehrssystems der Stadt Hallein wurde gemäß dem ebenfalls gerade erfolgreich abgeschlossenem Projekt DIGEST umgesetzt. Dabei wurde strikt nach den Vorgaben der formalen Informationsmodellierung vorgegangen, um hier eine Basis für spätere Dienste wie etwa ISAD/ODD (Infrastructure Support for Automated Driving with distributed ODD awareness) vorzubereiten und nachfolgend in eine CCAM Decision Support Plattform auszubauen.